



స్టాంపింగ్/ స్టాకింగ్ రోబోట్ SDCX RMD-300/200/160/120/35/08/110/20/50
సాంకేతిక పారామితులు
| మోడల్ నం. | స్వేచ్ఛా డిగ్రీ | డ్రైవింగ్ మోడ్ | పేలోడ్ (కేజీ) | పునరావృత స్థాన ఖచ్చితత్వం (మిమీ) | చలన పరిధి (°) | గరిష్ట వేగం (°/సె) | మణికట్టు యొక్క అనుమతించదగిన లోడ్ జడత్వం (kg·m2) | వృత్తాకార బీట్ (చక్రం/గంట) | గమన వ్యాసార్థం (మిమీ) | స్థానిక బరువు (కిలోలు) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 పరిచయం | 4 | AC సర్వో డ్రైవ్ | 300లు | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 లు | 190 తెలుగు | 134 తెలుగు in లో | 1000 అంటే ఏమిటి?③ | 3150 తెలుగు in లో | 1500 అంటే ఏమిటి? |
| SDCX-RMD200 పరిచయం | 4 | AC సర్వో డ్రైవ్ | 200లు | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 తెలుగు | 107 - अनुक्षित | 114 తెలుగు | 242 తెలుగు | 78 | 1300 తెలుగు in లో③ | 3150 తెలుగు in లో | 1500 అంటే ఏమిటి? |
| SDCX-RMD160 పరిచయం | 4 | AC సర్వో డ్రైవ్ | 160 తెలుగు | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 తెలుగు in లో | 123 తెలుగు in లో | 128 తెలుగు | 300లు | 78 | 1500 అంటే ఏమిటి?③ | 3150 తెలుగు in లో | 1500 అంటే ఏమిటి? |
| SDCX-RMD120 పరిచయం | 4 | AC సర్వో డ్రైవ్ | 120 తెలుగు | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 తెలుగు | 126 తెలుగు | 135 తెలుగు in లో | 300లు | 78 | 1560 తెలుగు in లో③ | 3150 తెలుగు in లో | 1500 అంటే ఏమిటి? |
| SDCX-RMD50 పరిచయం | 4 | AC సర్వో డ్రైవ్ | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 తెలుగు | 171 తెలుగు | 171 తెలుగు | 222 తెలుగు in లో | 4.5 अगिराला | 1700 తెలుగు in లో② (ఎయిర్) | 2040 | 660 తెలుగు in లో |
| SDCX-RMD20 యొక్క లక్షణాలు | 4 | AC సర్వో డ్రైవ్ | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 తెలుగు | 170 తెలుగు | 185 | 330 తెలుగు in లో | 0.51 తెలుగు | 1780 తెలుగు in లో① (ఆంగ్లం) | 1720 తెలుగు in లో | 256 తెలుగు in లో |
| SDCX-RMD08 యొక్క లక్షణాలు | 4 | AC సర్వో డ్రైవ్ | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 తెలుగు | 195 | 195 | 367.5 తెలుగు | 0.25 మాగ్నెటిక్స్ | 1800 తెలుగు in లో① (ఆంగ్లం) | 1433 | 180 తెలుగు |
వ్యాఖ్యలు:
① టెస్ట్ ట్రాక్ 150mm ఎత్తు మరియు 1000mm వెడల్పుతో ఉంటుంది మరియు వాస్తవ సైకిల్ సమయం వాస్తవ పని పరిస్థితుల ద్వారా ప్రభావితమవుతుంది;
② టెస్ట్ ట్రాక్ 200mm ఎత్తు మరియు 1000mm వెడల్పుతో ఉంటుంది మరియు వాస్తవ సైకిల్ సమయం వాస్తవ పని పరిస్థితుల ద్వారా ప్రభావితమవుతుంది;
③ టెస్ట్ ట్రాక్ 400mm ఎత్తు మరియు 2000mm వెడల్పుతో ఉంటుంది మరియు వాస్తవ సైకిల్ సమయం వాస్తవ పని పరిస్థితుల ద్వారా ప్రభావితమవుతుంది;
మండే, పేలుడు మరియు క్షయకారక వాయువులు మరియు ద్రవాలతో సంబంధాన్ని నివారించండి; నీరు, నూనె మరియు ధూళితో చిలకరించవద్దు; విద్యుత్ శబ్ద వనరులకు (ప్లాస్మా) దూరంగా ఉంచండి.
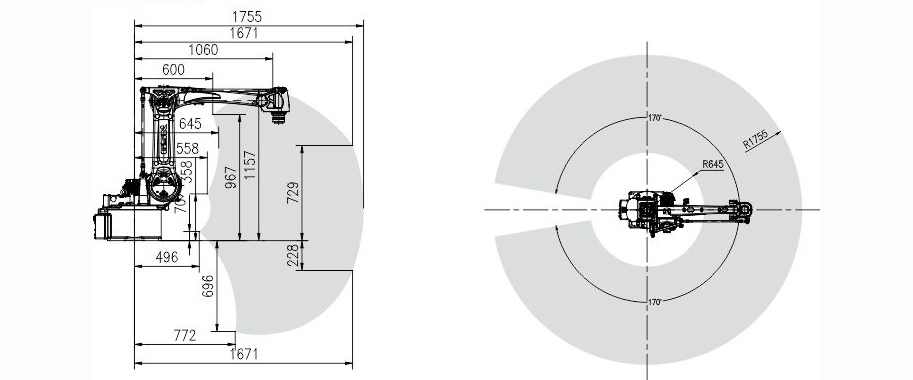
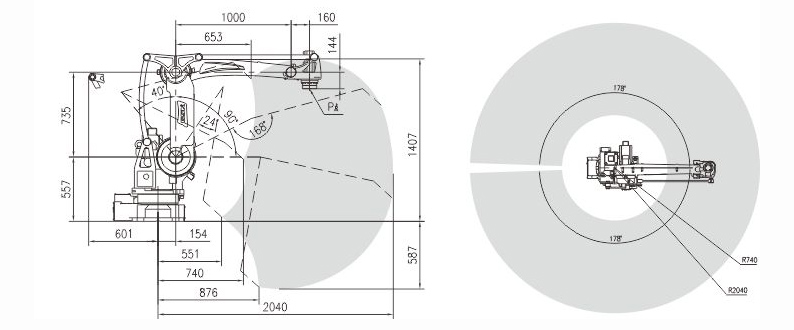
చలన పరిధి
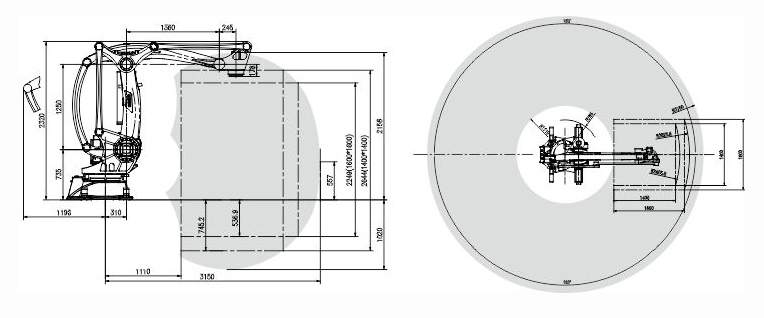
SDCX-RMD300/200/160/120 కోసం చలన పరిధి యొక్క ప్లాట్
SDCX-RMD20 కోసం చలన పరిధి యొక్క ప్లాట్
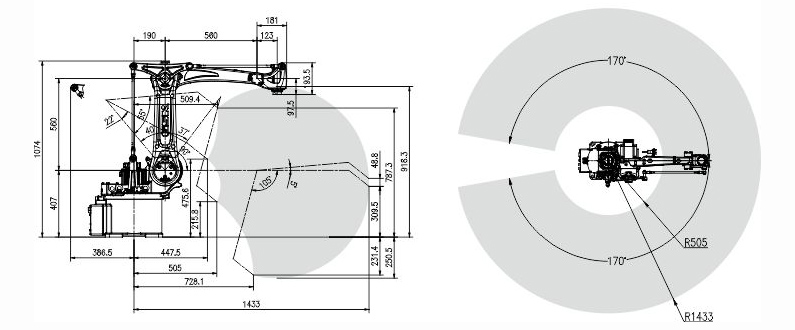
SDCX-RMD08 కోసం చలన పరిధి యొక్క ప్లాట్
SDCX-RMD50 కోసం చలన పరిధి యొక్క ప్లాట్
ఉత్పత్తి అప్లికేషన్ డిస్ప్లే
పరిష్కారాలు
స్టీల్ కాయిల్ హ్యాండ్లింగ్ ప్రాజెక్ట్ యొక్క సాంకేతిక పథకం












